Uma matriz de Vandermonde de ordem m × n tem a forma geral:
ou
, para todos os índices i e j.[1] Alguns autores usam a transposta da matriz acima, ou seja, as colunas estão em progressão geométrica.
Determinante
O determinante de uma matriz de Vandermonde de tamanho n×n se expressa da seguinte forma[2]:
Esta fórmula é conhecida por vezes como o discriminante, mas em geral o discriminante é definido como o quadrado da fórmula acima.
Demonstra-se essa fórmula por indução.[2] No caso da matriz 2x2 é fácil verificar.
Agora, provemos para a matriz nxn supondo válido para as matrizes n-1 x n-1. Seja a coluna i, então multiplicamos a coluna por e somamos com a coluna :
Calculando o determinante, pelo Teorema de Laplace acaba-se por eliminar a primeira linha e a primeira coluna, achando assim uma matriz de n-1×n-1, logo.
Segue da propriedade 10[3] que se pode fatorar os coeficientes caindo em uma matriz de Vandermonde n-1×n-1..
E por hipótese de indução temos que
Interpolação polinomial
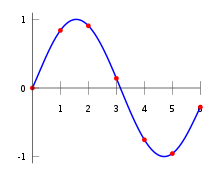
Os pontos vermelhos denotam os pares (xi,yi), enquanto a curva azul mostra o gráfico do polinômio interpolador.
A matriz de Vandermonde surge naturalmente do problema de interpolação polinomial, ou seja: dado um conjunto de n pares ordenados com i variando entre 1 e n, encontrar o polinômioP(x) com n graus de liberdade (ou seja, o seu grau máximo é n-1) tal que . A solução deste problema consiste em resolver o seguinte sistema linear:
Onde são os coeficientes do polinômio . O fato de a matriz de Vardemonte ter determinante não nulo implica que o problema tem solução e que ela é única.
O número de condicionamento da matriz pode ser grande,[4] causando erros importantes no cálculo dos coeficientes se o sistema for resolvido usando eliminação gaussiana. Diversos autores propuseram algoritmos numericamente estáveis que exploram a estrutura da matriz de Vandermonde para resolver o problema em operações ao invés de exigidos pela eliminação gaussiana.[5][6][7] Estes métodos consistem em primeiro construir um polinômio de Newton e depois convertê-lo para a forma canônica acima.
Referências
↑Roger A. Horn and Charles R. Johnson (1991), Topics in matrix analysis, Cambridge University Press. See Section 6.1
↑ abProva em inglês e referências adicionais http://www.proofwiki.org/wiki/Vandermonde_Determinant
↑«Determinante». Wikipédia, a enciclopédia livre. 1 de junho de 2017
↑Gautschi, Walter (1975). «Norm Estimates for Inverses of Vandermonde Matrices». Numerische Mathematik. 23: 337–347. doi:10.1007/BF01438260
↑Higham, N. J. (1988). «Fast Solution of Vandermonde-Like Systems Involving Orthogonal Polynomials». IMA Journal of Numerical Analysis. 8: 473–486. doi:10.1093/imanum/8.4.473
↑Björck, Å; V. Pereyra (1970). «Solution of Vandermonde Systems of Equations». Mathematics of Computation. 24 (112): 893–903. doi:10.2307/2004623A referência emprega parâmetros obsoletos |coautor= (ajuda)
↑Calvetti, D and Reichel, L (1993). «Fast Inversion of Vanderomnde-Like Matrices Involving Orthogonal Polynomials». BIT. 33 (33): 473–484. doi:10.1007/BF01990529 !CS1 manut: Nomes múltiplos: lista de autores (link)