Steiner conic
The Steiner conic or more precisely Steiner's generation of a conic, named after the Swiss mathematician Jakob Steiner, is an alternative method to define a non-degenerate projective conic section in a projective plane over a field.
The usual definition of a conic uses a quadratic form (see Quadric (projective geometry)). Another alternative definition of a conic uses a hyperbolic polarity. It is due to K. G. C. von Staudt and sometimes called a von Staudt conic. The disadvantage of von Staudt's definition is that it only works when the underlying field has odd characteristic (i.e., ).

Definition of a Steiner conic
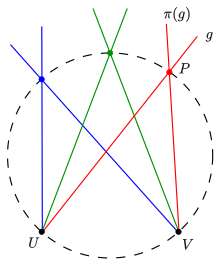
- Given two pencils of lines at two points (all lines containing and resp.) and a projective but not perspective mapping of onto . Then the intersection points of corresponding lines form a non-degenerate projective conic section[1][2][3][4] (figure 1)







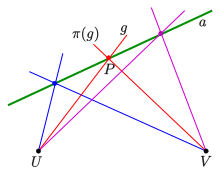
A perspective mapping of a pencil onto a pencil is a bijection (1-1 correspondence) such that corresponding lines intersect on a fixed line , which is called the axis of the perspectivity (figure 2).

A projective mapping is a finite product of perspective mappings.
Simple example: If one shifts in the first diagram point and its pencil of lines onto and rotates the shifted pencil around by a fixed angle then the shift (translation) and the rotation generate a projective mapping of the pencil at point onto the pencil at . From the inscribed angle theorem one gets: The intersection points of corresponding lines form a circle.

Examples of commonly used fields are the real numbers , the rational numbers or the complex numbers . The construction also works over finite fields, providing examples in finite projective planes.



Remark: The fundamental theorem for projective planes states,[5] that a projective mapping in a projective plane over a field (pappian plane) is uniquely determined by prescribing the images of three lines. That means that, for the Steiner generation of a conic section, besides two points only the images of 3 lines have to be given. These 5 items (2 points, 3 lines) uniquely determine the conic section.
Remark: The notation "perspective" is due to the dual statement: The projection of the points on a line from a center onto a line is called a perspectivity (see below).[5]


Example
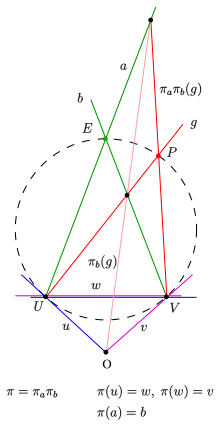
For the following example the images of the lines (see picture) are given: . The projective mapping is the product of the following perspective mappings : 1) is the perspective mapping of the pencil at point onto the pencil at point with axis . 2) is the perspective mapping of the pencil at point onto the pencil at point with axis . First one should check that has the properties: . Hence for any line the image can be constructed and therefore the images of an arbitrary set of points. The lines and contain only the conic points and resp.. Hence and are tangent lines of the generated conic section.











A proof that this method generates a conic section follows from switching to the affine restriction with line as the line at infinity, point as the origin of a coordinate system with points as points at infinity of the x- and y-axis resp. and point . The affine part of the generated curve appears to be the hyperbola .[2]



Remark:
- The Steiner generation of a conic section provides simple methods for the construction of ellipses, parabolas and hyperbolas which are commonly called the parallelogram methods.
- The figure that appears while constructing a point (figure 3) is the 4-point-degeneration of Pascal's theorem.[6]
Steiner generation of a dual conic


Definitions and the dual generation
Dualizing (see duality (projective geometry)) a projective plane means exchanging the points with the lines and the operations intersection and connecting. The dual structure of a projective plane is also a projective plane. The dual plane of a pappian plane is pappian and can also be coordinatized by homogeneous coordinates. A nondegenerate dual conic section is analogously defined by a quadratic form.
A dual conic can be generated by Steiner's dual method:
- Given the point sets of two lines and a projective but not perspective mapping of onto . Then the lines connecting corresponding points form a dual non-degenerate projective conic section.

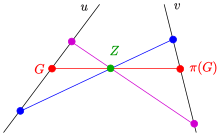
A perspective mapping of the point set of a line onto the point set of a line is a bijection (1-1 correspondence) such that the connecting lines of corresponding points intersect at a fixed point , which is called the centre of the perspectivity (see figure).
A projective mapping is a finite sequence of perspective mappings.
It is usual, when dealing with dual and common conic sections, to call the common conic section a point conic and the dual conic a line conic.
In the case that the underlying field has all the tangents of a point conic intersect in a point, called the knot (or nucleus) of the conic. Thus, the dual of a non-degenerate point conic is a subset of points of a dual line and not an oval curve (in the dual plane). So, only in the case that is the dual of a non-degenerate point conic a non-degenerate line conic.


Examples


(1) Projectivity given by two perspectivities:
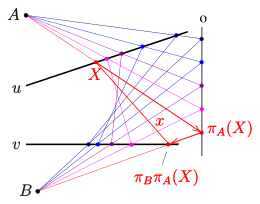
Two lines with intersection point are given and a projectivity from onto by two perspectivities with centers . maps line onto a third line , maps line onto line (see diagram). Point must not lie on the lines . Projectivity is the composition of the two perspectivities: . Hence a point is mapped onto and the line is an element of the dual conic defined by .
(If would be a fixpoint, would be perspective.[7])










(2) Three points and their images are given:
The following example is the dual one given above for a Steiner conic.
The images of the points are given: . The projective mapping can be represented by the product of the following perspectivities :



- is the perspectivity of the point set of line onto the point set of line with centre .
- is the perspectivity of the point set of line onto the point set of line with centre .


One easily checks that the projective mapping fulfills . Hence for any arbitrary point the image can be constructed and line is an element of a non degenerate dual conic section. Because the points and are contained in the lines , resp.,the points and are points of the conic and the lines are tangents at .




Intrinsic conics in a linear incidence geometry
The Steiner construction defines the conics in a planar linear incidence geometry (two points determine at most one line and two lines intersect in at most one point) intrinsically, that is, using only the collineation group. Specifically, is the conic at point afforded by the collineation , consisting of the intersections of and for all lines through . If or for some then the conic is degenerate. For example, in the real coordinate plane, the affine type (ellipse, parabola, hyperbola) of is determined by the trace and determinant of the matrix component of , independent of .







By contrast, the collineation group of the real hyperbolic plane consists of isometries. Consequently, the intrinsic conics comprise a small but varied subset of the general conics, curves obtained from the intersections of projective conics with a hyperbolic domain. Further, unlike the Euclidean plane, there is no overlap between the direct preserves orientation – and the opposite reverses orientation. The direct case includes central (two perpendicular lines of symmetry) and non-central conics, whereas every opposite conic is central. Even though direct and opposite central conics cannot be congruent, they are related by a quasi-symmetry defined in terms of complementary angles of parallelism. Thus, in any inversive model of , each direct central conic is birationally equivalent to an opposite central conic.[8] In fact, the central conics represent all genus 1 curves with real shape invariant . A minimal set of representatives is obtained from the central direct conics with common center and axis of symmetry, whereby the shape invariant is a function of the eccentricity, defined in terms of the distance between and . The orthogonal trajectories of these curves represent all genus 1 curves with , which manifest as either irreducible cubics or bi-circular quartics. Using the elliptic curve addition law on each trajectory, every general central conic in decomposes uniquely as the sum of two intrinsic conics by adding pairs of points where the conics intersect each trajectory.[9]





Notes
- ^ Coxeter 1993, p. 80
- ^ a b Hartmann, p. 38
- ^ Merserve 1983, p. 65
- ^ Jacob Steiner's Vorlesungen über synthetische Geometrie, B. G. Teubner, Leipzig 1867 (from Google Books: (German) Part II follows Part I) Part II, pg. 96
- ^ a b Hartmann, p. 19
- ^ Hartmann, p. 32
- ^ H. Lenz: Vorlesungen über projektive Geometrie, BI, Mannheim, 1965, S. 49.
- ^ Sarli, John (April 2012). "Conics in the hyperbolic plane intrinsic to the collineation group". Journal of Geometry. 103 (1): 131–148. doi:10.1007/s00022-012-0115-5. ISSN 0047-2468. S2CID 119588289.
- ^ Sarli, John (2021-10-22). "The Elliptic Curve Decomposition of Central Conics in the Real Hyperbolic Plane" (Preprint). doi:10.21203/rs.3.rs-936116/v1.
References
Wikimedia Commons has media related to Steiner conic.
- Coxeter, H. S. M. (1993), The Real Projective Plane, Springer Science & Business Media
- Hartmann, Erich, Planar Circle Geometries, an Introduction to Moebius-, Laguerre- and Minkowski Planes (PDF), retrieved 20 September 2014 (PDF; 891 kB).
- Merserve, Bruce E. (1983) [1959], Fundamental Concepts of Geometry, Dover, ISBN 0-486-63415-9











